富士通は2026年4月23日、複数のロボットやセンサーを統合して自律制御する基本ソフトウェア「Fujitsu Kozuchi Physical OS」の開発に着手したと発表した。ロボットが自律的に判断して動くための「行動知能」と、周辺環境を把握する「空間知能」を組み合わせ、場所や用途を問わずロボットが柔軟に業務をこなせる環境を整える。
富士通は、ロボット向け基本ソフトウェア「Fujitsu Kozuchi Physical OS」の開発に着手した。ロボットアームや人型ロボット、AMR(自律移動ロボット)など異種のロボットを現場環境で協調させて動かすための基盤として設計する。ロボットメーカーとの協業を通じて技術を普及させる。
 図1:ロボット向け基本ソフトウェア「Fujitsu Kozuchi Physical OS」の概要(出典:富士通)
図1:ロボット向け基本ソフトウェア「Fujitsu Kozuchi Physical OS」の概要(出典:富士通)拡大画像表示
基本ソフトウェアは、ロボットが自律的に判断して動くための「行動知能」と、周辺環境を把握する「空間知能」の2つの要素で構成する(図1)。ロボット側には行動知能を搭載し、過去の経験や人の動作を手本にしながら新たな作業へ適応できるようにする。
空間知能は、環境側のサーバーソフトウェアが担う。カメラや各種センサーから得た情報をもとに現場の状況をリアルタイムに把握し、各ロボットへと必要な情報を供給する。両知能が連携することで、複数のロボットが業務指示に従って協調動作する仕組みを実現する。
2026年度中に初版(v1)を公開する(図2)。2027年度のv2ではロボットが対応できる作業の種類を柔軟に増やせる仕組みを整える。2028年度のv3では種類の異なるロボットがリアルタイムで連携しながら現場に適応していく環境を目指す。
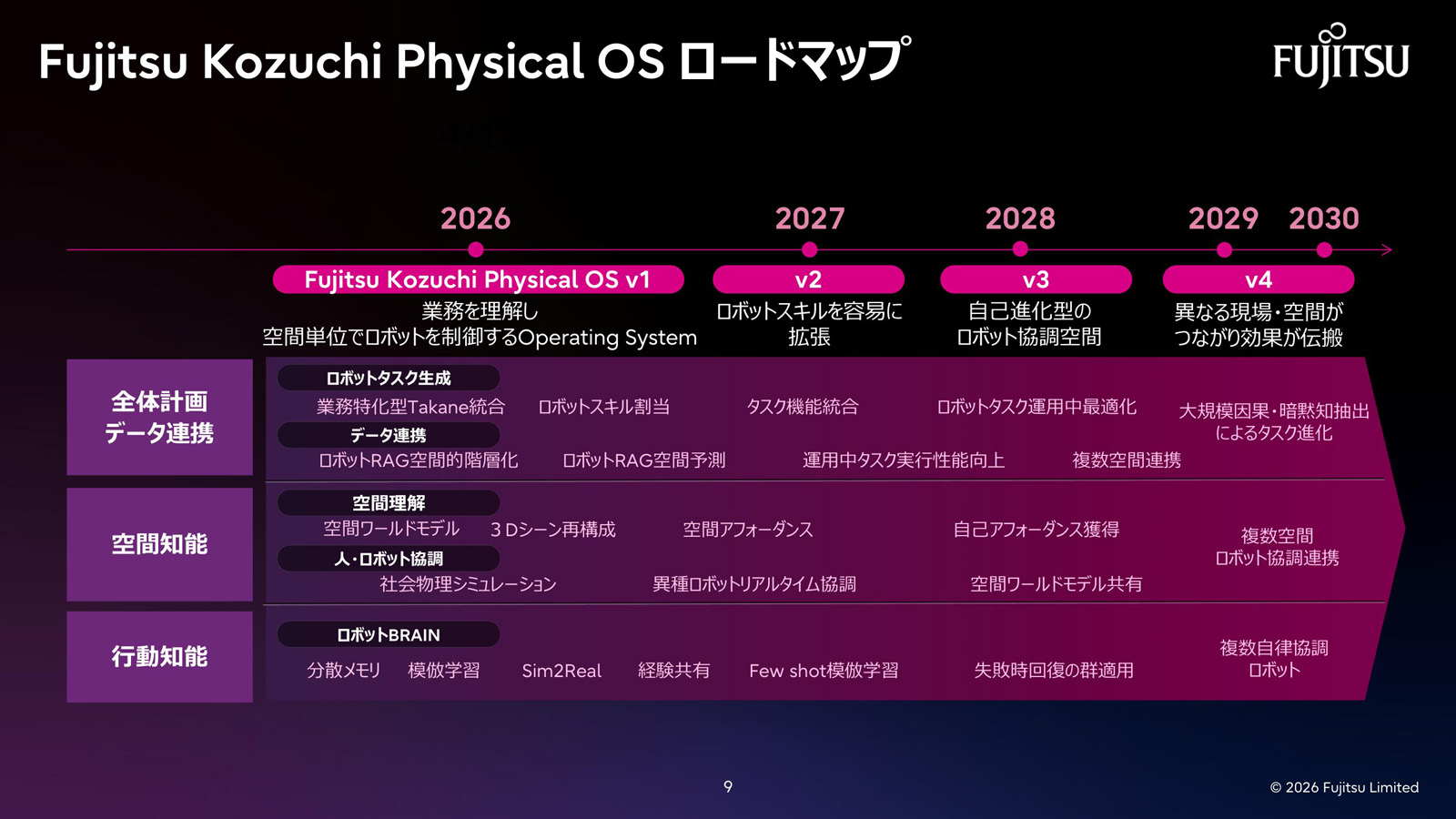 図2:ロボット向け基本ソフトウェア「Fujitsu Kozuchi Physical OS」の開発ロードマップ(出典:富士通)
図2:ロボット向け基本ソフトウェア「Fujitsu Kozuchi Physical OS」の開発ロードマップ(出典:富士通)拡大画像表示
2029~2030年度のv4では、人とロボットが同じ空間で協調して作業できる環境を実現する。ある現場で蓄積したロボットの経験や知識を他の現場でも活用できるようにし、効果を社会全体へ広げていく。
ロボットの動作学習や空間認識、複数ロボットの協調制御といったOSのコア技術は、米カーネギーメロン大学と共同で開発する。こうして得た研究成果を富士通が基本ソフトウェアに実装する。これに先立ち富士通は、同大学とフィジカルAIの要素技術を研究する共同研究センターを設立した。ロボティクス、機械学習、言語理解、人とロボットの相互作用など、13人の教授が参画し、100人規模の研究体制を敷く。
富士通 / カーネギーメロン大学 / フィジカルAI




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-
