安川電機は2017年11月21日、無造作に積まれた物体をロボットのピッキングアームで上手につかめるようにする「AIピッキング機能」を開発したと発表した。ピッキングアームに取り付けたカメラの画像を、ディープラーニング(深層学習)を用いて学習することで、個々の物体に適したつかみ方を学習する。部品配膳システムや仕分けシステムへの適用を見込む。
ロボットアームの先端に取り付けたカメラの画像情報をコントローラに入力し、ディープラーニングを用いて、ロボットみずから適切なつかみ方を学習する。人間がつかみ方を教える必要がない。ピッキングの実行時には、対象物の状態に合わせて適切につかむようになる。また、学習したAIはロボットに依存しないため、他のロボットに移植できる。
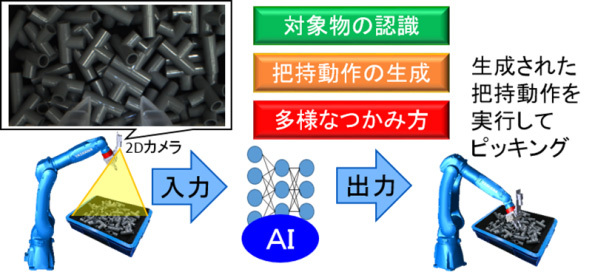 図1●AIピッキング機能の概要。カメラ画像を深層学習で学習して適切なつかみ方を学習する(出所:安川電機)
図1●AIピッキング機能の概要。カメラ画像を深層学習で学習して適切なつかみ方を学習する(出所:安川電機) 拡大画像表示
単一のグリッブ部を使って多数の対象物を学習するため、対象物の形状に依存することなく、単一のグリップ部で多数の物品をピッキングできる。これに対し、現状のロボットを用いた複数物品のピッキングシステムでは、多くの場合、グリップ部を対象物ごとに変更して使っているという。
2Dカメラによる低コスト化も図った。現状のバラ積みピッキングシステムでは、3Dカメラを用いたシステムを用いて、高精度に対象物の位置姿勢を認識してピッキングを行うのが一般的であるという。これに対して今回開発した機能では、安価な2Dカメラの画像で学習を行うため、低コストでシステムを導入できる。
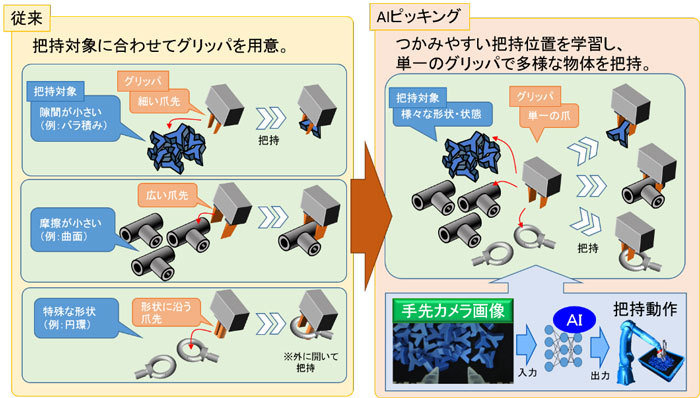 図2●単一のグリップ部で多様な部品をつかむことができる(出所:安川電機)
図2●単一のグリップ部で多様な部品をつかむことができる(出所:安川電機) 拡大画像表示
なお、AIピッキング機能は、AIに特化したベンチャー企業であるクロスコンパスと共同で開発した。




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-

-

-

生成AIからAgentic AIへ―HCLSoftware CRO Rajiv Shesh氏に聞く、企業価値創造の課題に応える「X-D-Oフレームワーク」
-

-

-

「プラグアンドゲイン・アプローチ」がプロセス変革のゲームチェンジャー。業務プロセスの持続的な改善を後押しする「SAP Signavio」
-

BPMとプロセスマイニングで継続的なプロセス改善を行う仕組みを構築、NTTデータ イントラマートがすすめる変革のアプローチ
-
