[事例ニュース]
凸版印刷、周囲の人の行動を予測して動く自動搬送ロボットを東京農工大と共同で研究
2023年8月14日(月)日川 佳三(IT Leaders編集部)
凸版印刷は2023年8月10日、人とロボットが協力して作業にあたれるようにする研究を、東京農工大学と共同で始めると発表した。人の行動を予測し、周囲の状況の変化に対処可能なロボットのアルゴリズムを開発する。複数の自律走行搬送ロボット(AMR)をAIカメラ、各種センサー、エッジデバイスなどと連携させて実現する。
凸版印刷は、人とロボットが協力して作業にあたれるようにする研究を、東京農工大学と共同で始める。物流倉庫でのピッキング作業を題材に、人の動きを考慮した自律走行搬送ロボット(AMR:Autonomous Mobile Robot)の搬送経路を作成する。人の行動を予測し、周囲の状況の変化に対処可能なロボットのアルゴリズムをAIを用いて開発する(図1)。
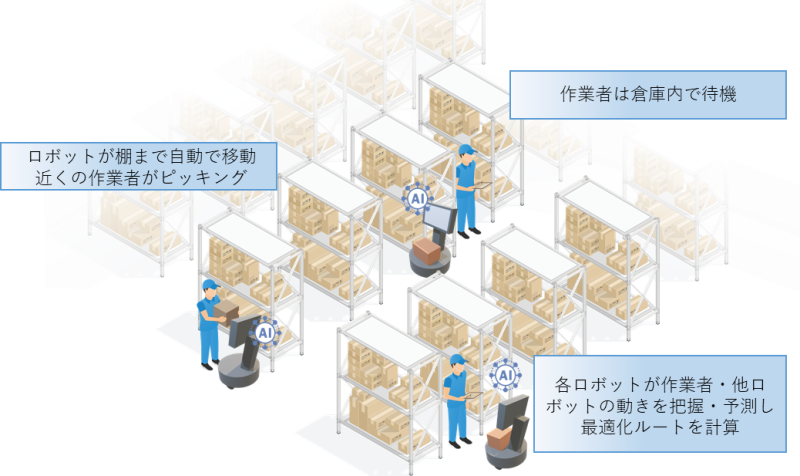 図1:ピッキング倉庫で人とロボットが協調して動作するイメージ(出典:凸版印刷)
図1:ピッキング倉庫で人とロボットが協調して動作するイメージ(出典:凸版印刷)拡大画像表示
「中小規模の物流倉庫ではスペースや費用の制限から人が介在するケースが多く、人とロボットが相互に作業の妨げになっている。人間のように行動を予測しにくい存在と共存可能なロボットが期待されている」(両者)
共同研究における2者の役割について、凸版印刷は、最適化アルゴリズムをAMRに実装し、ピッキングシステムを試作し、実際にピッキング倉庫でこれを評価する。東京農工大は、適切な経路を作成するアルゴリズムとシミュレータを開発する。
研究ではまず、AMRやエッジデバイス(スマートフォンなど)で動作するAIを開発する。複数のAMRやスマートフォン間で共有した情報を利用し、各AMRが自律的に環境と状況を判断し、適切な移動経路をリアルタイムに選択できるようにする。
さらに、開発した技術の効果を物流倉庫のピッキング作業で検証する。また、業務開始前に各種条件でピッキング作業をシミュレートし、作業者が作業計画を策定する際の補助ツールとして有益性を検証する。
研究の成果として凸版印刷は、倉庫におけるAMRの経路最適化システムを開発し、自社で利用するほか、これを外販する。




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-

-

-

生成AIからAgentic AIへ―HCLSoftware CRO Rajiv Shesh氏に聞く、企業価値創造の課題に応える「X-D-Oフレームワーク」
-

-

-

「プラグアンドゲイン・アプローチ」がプロセス変革のゲームチェンジャー。業務プロセスの持続的な改善を後押しする「SAP Signavio」
-

BPMとプロセスマイニングで継続的なプロセス改善を行う仕組みを構築、NTTデータ イントラマートがすすめる変革のアプローチ
-
