[市場動向]
NEC、「人間系世界モデル」を活用したフィジカルAIを開発、人とロボットが“ぶつかる不安”を予測して回避
2026年3月13日(金)日川 佳三、河原 潤(IT Leaders編集部)
NECは2026年3月12日、産業現場で働く人とロボットが不安なく協働できる環境を支援する技術を発表した。人の動きと心理状態を予測する独自の「人間系世界モデル」を活用し、人の不安の程度を定量的に推定。そのうえで、不安を高めないように先回りしてロボットを制御するフィジカルAIを開発している。ロボットと人の相対的な位置・姿勢から人の進行方向や不安の程度をリアルタイムで予測し、不安を軽減できる経路や速度で自律走行する。2027年度中の実用化を目指す。合わせて、個々人の作業内容を時系列で把握できるようにするデジタルツイン技術を開発している。
NECは、産業現場で働く人とロボットが不安なく協働できる環境を支援する技術を発表した。
技術開発の背景を以下のように説明する。「産業現場における労働力不足や危険作業への対応策として、フィジカルAIを活用したロボットへの期待が高まっている。人とロボットが協働する現場においては、衝突や接触を避ける身体的な安全性に加えて、人がロボットに対して抱く不安を軽減する心理的安全性の確保も重要となる」(NEC)。
しかし、ロボットが人の動きや心理を正確に把握し、先を見越して走行を制御することは技術的に容易ではなく、ロボットの不意な挙動によって人が不安や緊張を感じ、円滑な協働が妨げられるという課題があるという。
人の動きと心理状態を予測し、先回りしてロボットを制御
従来のロボットは、人の付近で動きを止めて立ち止まるか、人から大きく距離をとって回避する動きをとるが、そのつどロボットの作業効率が落ちてしまう。NECは、人の動きに合わせた最低限の回避行動をとることができれば、ロボットの作業効率を最大化できるとし、ロボットと人がぶつからないようにロボットを制御するフィジカルAIの開発に取り組んだ(図1)。
「ロボットと人が一緒に働く環境では、人はロボットとぶつかることに不安を感じる。不安の大きさは、ロボットと人の相対的な位置と姿勢(向き)で変わる。不安が大きいと人の作業時間も伸びてしまう。ロボットが人を不安にさせない動きをとることで、人の作業効率を最大化できる」(NEC)
ロボットが特定の走行制御を実行した場合の「将来の人の不安の程度」を予測し、不要な減速や停止を抑えつつ、移動効率を維持しながら不安を最小限に抑える走行を実現する。2027年度の商用化を目指している。
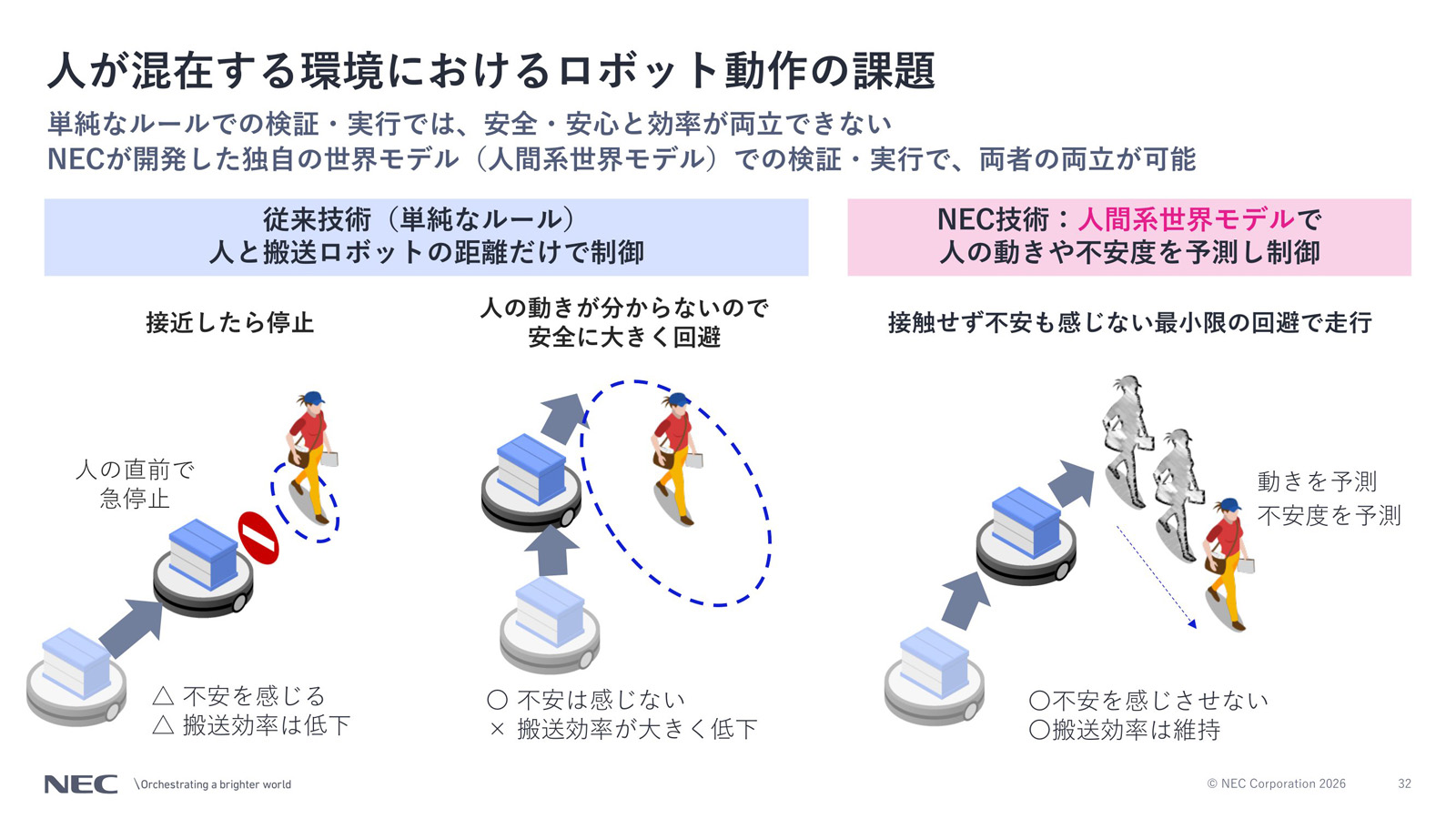 図1:人が混在する環境におけるロボット動作の課題(出典:NEC)
図1:人が混在する環境におけるロボット動作の課題(出典:NEC)拡大画像表示
具体的には、人の動きを予測するモデルと、ロボットにぶつかるという人が感じる不安を予測するモデルを組み合わせた独自の「人間系世界モデル」を活用することで、上述の心理的安全性の課題を解決して、人とロボットの作業効率を最大化できるとしている。
(1)人の動きを予測するモデルは、「人とロボットの挙動」や「人と物理的な周囲の状況」との関係を捉える。人の3D骨格情報を取り入れ、ロボットに搭載されたカメラ映像とロボットの制御情報を基に、数秒後に映像に映る人の3次元位置や姿勢を高精度に予測する。
「過去の動き(軌跡)のみに基づいて未来の動きを予測するのではなく、壁やロボットなどの周辺環境を考慮して動きを予測する。例えば、人は壁に向かっていくことはないし、前にロボットがいたら避ける」(NEC)
(2)ロボットにぶつかる不安を予測するモデルは、人の動きと心理状態を予測し、ロボットと人の相対的な位置と姿勢から、不安度を逐次予測する。
ロボットを被験者の周囲に走らせて不安の程度を調査した実験結果とロボットの走行データをAIに学習させている。これにより、人とロボットの相対的な位置・姿勢・速度に基づき、個々の状況に応じて人が感じる不安の程度をリアルタイムで定量的に推定する(図2)。
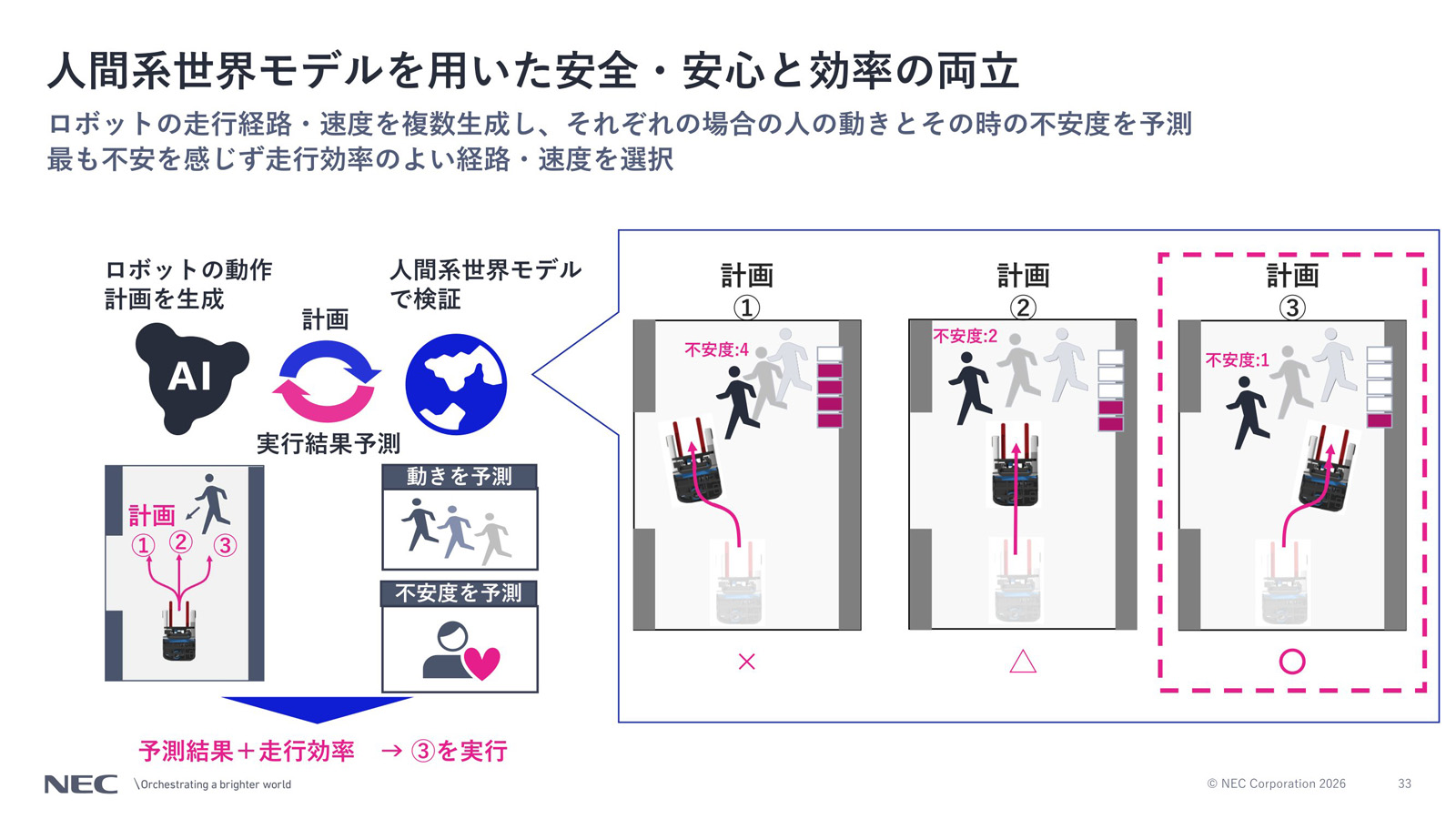 図2:人の動きと不安度の予測をもとに回避行動を計画するプロセスの概要(出典:NEC)
図2:人の動きと不安度の予測をもとに回避行動を計画するプロセスの概要(出典:NEC)拡大画像表示
●Next:映像から作業内容を特定し、移動する人の動きを複数のカメラにまたがって追跡
会員登録(無料)が必要です


- 1
- 2
- 次へ >




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-
