[市場動向]
NEC、倉庫・工場の自動搬送ロボットを安定稼働させる無線通信技術を開発
2024年9月9日(月)IT Leaders編集部
NECは2024年9月6日、倉庫・工場で自動搬送ロボット(AGV)を安定稼働させる無線通信技術を開発したと発表した。遮蔽物や移動の影響で無線通信の品質が低下した際に、最も遅延が少ない無線ネットワークに切り替えることでAGVの停止や不安定な稼働を回避する。映像データよりも制御データを優先して送るといった制御も行う。2024年度中に実際の倉庫で実証実験を行い、2025年度の実用化を目指す。
NECは、倉庫・工場で自動搬送ロボット(AGV)を安定稼働させる無線通信技術を開発した。遮蔽物や移動の影響で無線通信の品質が低下した際に、遅延が少ない無線ネットワークに切り替える。映像データよりも制御データを優先して送るといった制御も行う。2024年度中に実際の倉庫で実証実験を行い、2025年度の実用化を目指す(図1)。
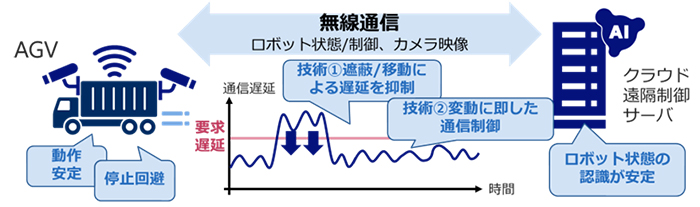 図1:倉庫・工場の自動搬送ロボットを安定稼働させる無線通信技術の概要(出典:NEC)
図1:倉庫・工場の自動搬送ロボットを安定稼働させる無線通信技術の概要(出典:NEC)拡大画像表示
AGVには自律的に稼働するものと、遠隔地やクラウド上のサーバーから制御するものがある。遠隔制御の場合、現場の無線ネットワークを通じてAGVの状態認識および制御データの配信、搭載カメラで撮影した周辺映像の配信などを行っている。
現場の無線ネットワークは、柱・壁・設備などの遮蔽物や移動の影響で通信品質が低下し、円滑な制御に必要な通信の遅延要件を超過することがある。また、映像データや制御データなどの通信トラフィックが混在し、無線リソースの競合(順番待ち)が発生することで、通信遅延が変動することがある。
「こうした無線通信の品質低下が、AGVの稼働停止や状態認識・制御の不安定化を引き起こす。複数の無線ネットワークを使ってネットワークにつながりやすい環境を構築することである程度は防げるが、通信量が増大しアクセスが集中(輻輳)すると、通信の断絶や遅延が発生して制御が不安定になる」(NEC)。
NECは、これらの課題を解決すべく2つの技術を開発した(図2)。
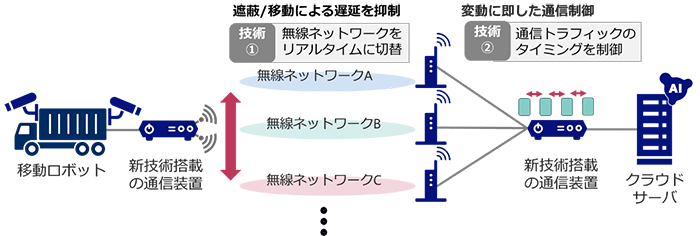 図2:無線通信の品質低下時に遅延を回避する技術の詳細(出典:NEC)
図2:無線通信の品質低下時に遅延を回避する技術の詳細(出典:NEC)拡大画像表示
1つは、通信の状態をパケット単位でリアルタイムに分析し、変動する通信品質を予測し、そのうえで最も遅延が少ない無線ネットワークに切り替える技術である。これにより、品質の良いネットワークに接続し続けることができ、通信遅延を抑えてAGV制御における通信の遅延要件の超過を避けることで、稼働停止を回避する。
もう1つは、データの内容や通信性能の要件(帯域、通信遅延、遅延の変動など)に応じてデータの送信タイミングを調整する、通信トラフィックの制御技術である。これにより、映像データはAGVの稼働に影響のない範囲で遅延を許容しつつ、制御データは優先して送ることでAGVの安定稼働を実現する。




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-

-

-

生成AIからAgentic AIへ―HCLSoftware CRO Rajiv Shesh氏に聞く、企業価値創造の課題に応える「X-D-Oフレームワーク」
-

-

-

「プラグアンドゲイン・アプローチ」がプロセス変革のゲームチェンジャー。業務プロセスの持続的な改善を後押しする「SAP Signavio」
-

BPMとプロセスマイニングで継続的なプロセス改善を行う仕組みを構築、NTTデータ イントラマートがすすめる変革のアプローチ
-
