日立製作所は2018年5月31日、深層学習を用いたロボット制御技術の新しいアプローチとして、学習済みの複数の動作を状況に応じて自律的に組み合わせてロボット全身の制御を行う技術を開発したと発表した。ロボットを人が操作した際の動作を教示データとして学習させ、蓄積した学習済み動作の中から、必要な動作を組み合わせてロボット全身を制御する。
実際に、開発した技術を検証として、「ドアに接近する動作」、「ドアを開ける動作」、「ドアを通過する動作」、―を個別に学習し、この学習済み動作の組み合わせによって、「ドアを開けて通過する動作」を実現できることを、実際にロボットを動作させて確認したという。
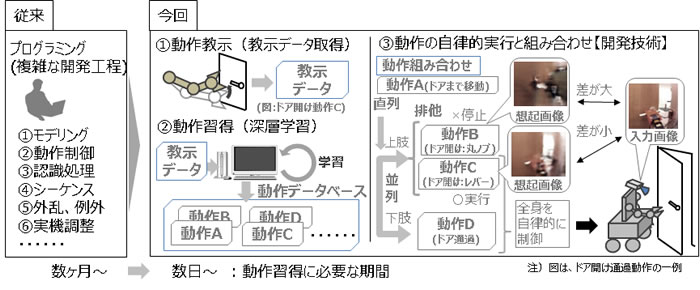 図1●学習済みの複数の動作を状況に応じて自律的に組み合わせてロボット全身の制御を行う技術の概要(出所:日立製作所)
図1●学習済みの複数の動作を状況に応じて自律的に組み合わせてロボット全身の制御を行う技術の概要(出所:日立製作所)拡大画像表示
同社は従来、「物をつかむ」、「移動する」といった個別の動作を実現する深層学習技術の開発に取り組んできた。しかし、人が行っているような上肢(手作業)と下肢(移動)が連携した全身の動作や複雑な動作手順が要求される複雑作業をロボットで実現するためには、別々に習得した動作を自由に組み合わせる技術が必要だったという。
今回開発した技術は、2つある。
技術の1つは、状況を判断し、学習済み動作を自律的に実行する技術である。ロボットが置かれている状況が学習済みか否かを判断し、学習済みの場合には動作を自律的に実行する。経験として蓄積した動作を組み合わせて実行する人の処理から着想したという。
具体的には、ロボットが搭載しているカメラへの入力画像について、特徴量を学習・記憶する。記憶済みの画像であれば、元の画像を想起(再構成)可能な深層学習モデルを用い、現在のロボットの入力画像と深層学習モデルの想起画像の差が小さい(学習経験がある既知の状況=経験値が高い)場合、この画像を記憶している学習済みの動作を自律的に実行する。
もう1つの技術は、動作を適切な手順で組み合わせて実行する技術である。(a)「直列実行」(ある動作の完了後に別の動作を実行)、(b)「排他的実行」(複数候補の動作の中から経験値の高い動作のみを実行)、(c)「並列実行」(複数動作を並列に実行)、―の3つのケースを指定できる技術を開発した。これにより、複雑な手順を実行できるようになった。




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-

-

-

生成AIからAgentic AIへ―HCLSoftware CRO Rajiv Shesh氏に聞く、企業価値創造の課題に応える「X-D-Oフレームワーク」
-

-

-

「プラグアンドゲイン・アプローチ」がプロセス変革のゲームチェンジャー。業務プロセスの持続的な改善を後押しする「SAP Signavio」
-

BPMとプロセスマイニングで継続的なプロセス改善を行う仕組みを構築、NTTデータ イントラマートがすすめる変革のアプローチ
-
