鹿島建設は2021年3月4日、建築現場で使用するロボットが現場内を自律移動できるようにするシステム「iNoh(アイノー)」をPreferred Networks(PFN)と共同で開発したと発表した。GNSS(全球測位衛星システム)や人による事前設定がなくても、各種ロボットがリアルタイムに自己位置や周辺環境を認識し、状況が変化する現場内を安全かつ確実に移動できるようにする。今回、iNohを搭載したAI清掃ロボット「raccoon(ラクーン)」を開発し、首都圏の現場に導入開始した。
鹿島建設は、生産性の向上や働き方改革の実現に向けて、建築現場でのロボットの活用を進めている。一方、Preferred Networks(PFN)は、自動運転やロボットの自律移動に必要なディープラーニング(深層学習)を用いた物体認識・制御などの技術を有している。
2018年には、建築現場で利用可能なロボットの開発に向けて、鹿島建設とPFNは共同研究を開始した。その後、現場の画像、3Dデータ、図面情報の収集、ディープラーニングによる学習、コストを含めた実用的なセンサー構成の検討、現場での試行実験などを積み重ね、「iNoh(アイノー)」を開発した。
iNohは、魚眼カメラ、LiDAR(レーザー照射による測距装置)、IMU(慣性計測装置)など複数のセンサーを統合することで、非GNSS環境においても自己位置を正確に推定する(図1)。また、得られたデータから3次元空間をマッピングする。iNohはまた、ディープラーニングで現場の画像データを学習することにより、障害物や高所作業車などの移動物、立入禁止エリア、作業員などを認識する。
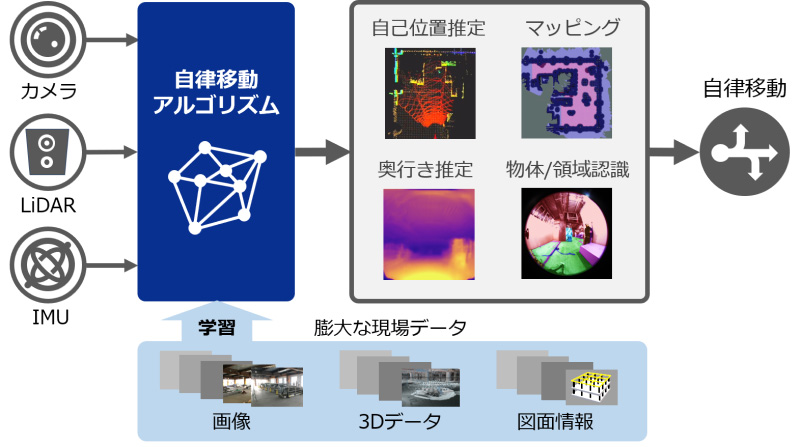 図1:自律移動システム「iNoh」のイメージ図(出典:鹿島建設、Preferred Networks)
図1:自律移動システム「iNoh」のイメージ図(出典:鹿島建設、Preferred Networks)拡大画像表示
自己位置や周辺環境の情報を利用することによって、障害物を回避した作業ルートをリアルタイムに自動生成する。これにより、作業範囲を限定するマーカー類の設置といった、人による事前の設定が要らない。
●Next:iNohを初実装した建築現場用のAI清掃ロボット「raccoon」
会員登録(無料)が必要です






- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-
