芝浦工業大学、早稲田大学、富士通の3組織は2025年8月25日、ロボットの姿勢制御に量子コンピュータを活用する手法を開発したと発表した。複数の関節を持つロボットの関節角度の計算を、量子技術を用いて効率的かつ高精度に解く。64量子ビットの実機検証で有効性を確認した。ロボットのリアルタイム制御や複雑な動作に貢献できるとしている。
芝浦工業大学、早稲田大学、富士通の3組織は、ロボットの姿勢制御に量子コンピュータを活用する手法を開発した。複数の関節を持つロボットにおける関節角度の計算を、量子技術を用いて効率的かつ高精度に解く。64量子ビットの実機検証で有効性を確認したという。ロボットのリアルタイム制御や複雑な動作に貢献できるとしている(図1)。
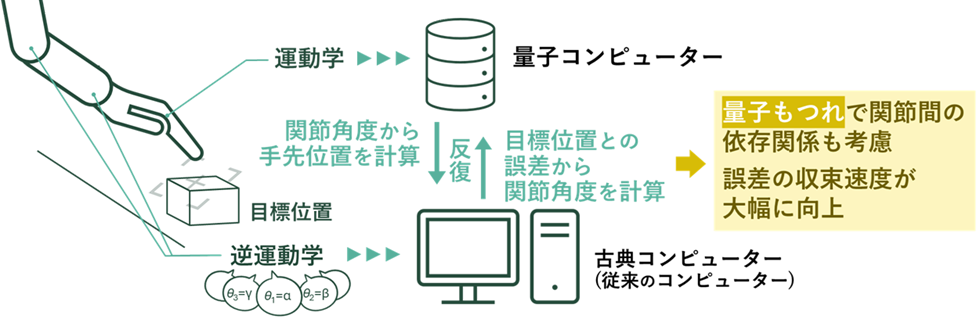 図1:ロボットの姿勢制御に量子コンピュータを活用する手法の概要(出典:芝浦工業大学、早稲田大学、富士通)
図1:ロボットの姿勢制御に量子コンピュータを活用する手法の概要(出典:芝浦工業大学、早稲田大学、富士通)拡大画像表示
3組織は、ロボットの姿勢制御においては、目標とする手先の位置から関節の角度を求める逆運動学計算(目標位置に到達するための関節角度の計算)が重要になると説明する。複数の関節を持つロボットの場合、目標位置との誤差を最小化するために反復計算が必要になり、計算負荷が高くなるという。
「従来は、人体の関節数と同じ17個の関節を持つ全身多関節のモデルでは解空間が膨大なため解けず、近似した7個の関節で運動計算を行うのが一般的だった。しかし、関節数が少ないと、動きの滑らかさに限界があった」(3組織)
今回の共同研究では、ロボットの各部品(リンク)の向きや位置を量子ビットで表現し、量子回路を用いて順運動学計算(関節角度から手先位置を求める計算)を実行している。「逆運動学計算を古典的なコンピュータで行いつつ、量子回路による順運動学計算を組み合わせることで、姿勢制御の効率を高めた」と説明している。
さらに、量子もつれを導入することで、親関節の動きが子関節に自然に影響を与える構造を量子回路上で再現。これにより、逆運動学計算の収束速度と精度の大幅な向上を達成したという。
富士通の量子シミュレータを用いた検証では、従来手法と比較して、少ない計算回数でも誤差が最大で43%減少。64量子ビットの実機を用いた実験においても、量子もつれ導入による効果を確認した。また、17個の関節を持つ全身多関節モデルの運動計算を30分程度で実行できる試算を得たとしている。
今回開発した手法は、少数の量子ビットで多関節ロボットの姿勢を表現できるため、現在の開発段階の量子コンピュータ(NISQ)環境でも実装可能としている。「将来的には、人型ロボットや多関節マニピュレータのリアルタイム制御、障害物回避、エネルギー最適化などへの応用が期待できる。また、量子フーリエ変換などの量子アルゴリズムとの組み合わせによる性能向上も見込める」(3組織)




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-
