竹中工務店、Kudan、ジザイエ、アスラテック、燈、センシンロボティクスの6社は2025年9月19日、建設現場ロボット用ソフトウェア開発基盤を共同で開発すると発表した。搬送・耐火被覆吹付・測量・清掃など建設現場の各種ロボット用に、共通機能モジュールを組み合わせてソフトウェアを開発できる基盤を開発する。同基盤の下、ロボットメーカーやSIベンダーは用途に応じて自由に機能モジュールを追加・拡張できる。
竹中工務店、Kudan、ジザイエ、アスラテック、燈、センシンロボティクスの6社が、建設現場ロボット用ソフトウェア開発基盤の共同開発プロジェクトを指導した。搬送・耐火被覆吹付・測量・清掃など建設現場の各種ロボット用に、共通機能モジュールを組み合わせてソフトウェアを開発できる基盤を開発する。同基盤の下、ロボットメーカーやSIベンダーは用途に応じて自由に機能モジュールを追加・拡張できる(写真1)。
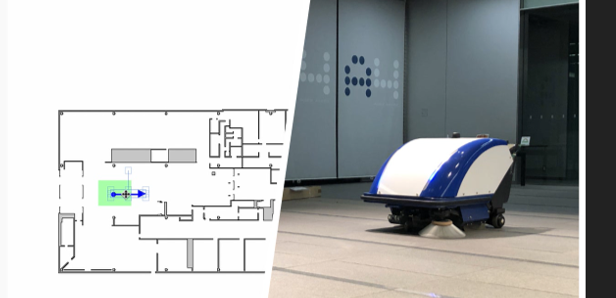 写真1:清掃ロボットがBIMデータ上で作業指示をする様子(出典:竹中工務店)
写真1:清掃ロボットがBIMデータ上で作業指示をする様子(出典:竹中工務店)拡大画像表示
共同開発の背景として、建設業界で熟練技能者の高齢化や技能者不足が深刻化し、ロボットによる解決に期待が集まっていることを挙げる。「現状では各ベンダーが個別にロボットを開発しており、互換性の欠如や開発コストの高さが課題になっている」(6社)。今回、建設RXコンソーシアム(注1)の活動を通じて蓄積した知見を基に、オープンな開発基盤の構築に取り組むとしている。
注1:建設RXコンソーシアムは、鹿島建設、清水建設、竹中工務店を幹事会社として2021年9月に設立された民間団体。建設関連業界の300社以上が参加する。建設業界が抱える就労人口の減少、生産性・安全性の向上などの諸課題の解決に向けて、施工ロボットやIoTアプリなどの開発と利用にかかるロボティクストランスフォーメーション(ロボット変革)を推進している。
以下の6つの研究開発項目において、建設ロボット用ソフトウェア開発基盤を構築する。
- 全体アーキテクチャ(基本構造)の設計と構築(竹中工務店)
- ロボットの機械部分からソフトウェアまでを包含するアーキテクチャの設計
- 異なるメーカーのロボットでも共通して使えるアーキテクチャの構築
- ソフトウェア機能開発(Kudan)
- 変化する建設現場でもロボットが正確に位置を把握して自動で移動できる技術
- 複数のロボットが互いに連携して、効率的に作業を行うシステム
- ハードウェア機能開発(ジザイエ)
- さまざまな作業に対応できる共通移動ユニット
- センサーや制御装置を簡単に取り付け/交換できる標準化された構造
- 通信環境構築(アスラテック)
- 5G・Wi-Fi・メッシュ通信など複数の通信方式を組み合わせた安定通信システム
- 建設現場の環境変化(障害物の増減など)に柔軟に対応する通信基盤
- 仮想空間での事前検証技術(燈)
- 実際の建設現場をコンピューター上で精密に再現してロボットの動作を事前テスト
- 建物の設計図(BIM/CIM)と連携した、リアルな作業環境シミュレーション
- 運用支援管理ツール(センシンロボティクス)
- 複数のロボットを一元的に監視・制御する管理システム
- 異なるメーカーのロボットでも共通して操作可能な標準インターフェース




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-

-

-

生成AIからAgentic AIへ―HCLSoftware CRO Rajiv Shesh氏に聞く、企業価値創造の課題に応える「X-D-Oフレームワーク」
-

-

-

「プラグアンドゲイン・アプローチ」がプロセス変革のゲームチェンジャー。業務プロセスの持続的な改善を後押しする「SAP Signavio」
-

BPMとプロセスマイニングで継続的なプロセス改善を行う仕組みを構築、NTTデータ イントラマートがすすめる変革のアプローチ
-
