新エネルギー・産業技術総合開発機構(NEDO)、NEC、NTTデータ、日立製作所、ゼンリン、日本気象協会は2019年6月28日、福島県と南相馬市、福島イノベーション・コースト構想推進機構の協力のもと、南相馬市復興工業団地内の「福島ロボットテストフィールド」における、同一空域で複数事業者のドローンが安全に飛行するための運航管理システム相互接続試験の環境整備に向けて、運航管理システムのAPIの仕様書を公開した。
NEDOは、同一空域で複数事業者のドローンが安全に飛行するための運航管理システムの開発や、南相馬市復興工業団地内の「福島ロボットテストフィールド」における運航管理システムの実証試験などを実施するプロジェクトを進めている。将来的には、国際標準への提案を見据え、あらゆるドローン事業者が安全にドローンを運航できる社会を目指している。
今回、福島ロボットテストフィールドにおける運航管理システムの相互接続試験のための環境整備に向けて、運航管理システムのAPIの仕様書を公開した(図1)。同APIを利用することにより、NEDOプロジェクトに参画していない国内外のドローン事業者でも、福島ロボットテストフィールド内で運航管理システムとの相互接続試験を行うことが可能になる。
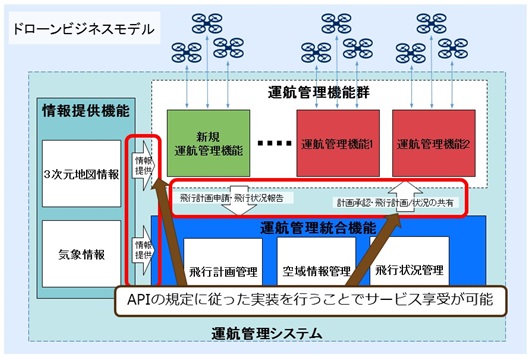 図1:運航管理システムのAPI(出典:国立研究開発法人新エネルギー・産業技術総合開発機構、NEC、NTTデータ、日立製作所、ゼンリン、一般財団法人日本気象協会)
図1:運航管理システムのAPI(出典:国立研究開発法人新エネルギー・産業技術総合開発機構、NEC、NTTデータ、日立製作所、ゼンリン、一般財団法人日本気象協会)拡大画像表示
今後、2019年7月26日にAPIのテストツールを公開し、同時に福島ロボットテストフィールドでAPIの説明会を行う。また、2019年8月30日には運航管理システムのサーバーを稼働させ、福島ロボットテストフィールドで相互接続試験を行える環境を整備する予定だ。なお、相互接続試験は、2017年11月22日にNEDOと福島県が締結したロボット・ドローンの実証等に関する協力協定に基づいて実施する。
運航管理システムのうち、ドローン事業者により運用される「運航管理機能」が「運航管理統合機能」や「情報提供機能」と通信を行う部分のAPIを公開する。運航管理統合機能により、ほかのドローン事業者と飛行計画やリアルタイムの飛行状況、飛行禁止空域など、空域の安全に関する情報を共有するサービスを利用することが可能になる。また、情報提供機能により、ドローンを安全に運航するために必要な地形、障害物、飛行規制エリアを含む3次元地図情報や、福島ロボットテストフィールドに整備されている気象観測装置のデータを利用したリアルタイム風推定情報などの気象情報を入手することが可能になる。
これらの情報はドローン事業者間で同一の情報が提供されるため、福島ロボットテストフィールドでは、情報の差による誤認識が発生しない運航管理システムの相互接続試験を実施できるようになる。
運航管理システムのAPIを公開する第1段階として、2019年6月28日にAPIの仕様書を公開した。これにより、ドローン事業者は相互接続試験に向けたソフト開発に着手できるようになった。次に、第2段階として、2019年7月26日にAPIのテストツールの公開を予定しており、この公開にあわせて相互接続試験に向けた説明会を福島ロボットテストフィールドで開催する。さらに、第3段階として2019年8月30日に運航管理システムのサーバーの稼働を予定している。サーバーが稼働することで、福島ロボットテストフィールドでドローン事業者が飛行試験をする際に、運航管理システムのサービスを受けることが可能になる。
NEDO、NEC、NTTデータ、日立製作所、ゼンリン、日本気象協会は、運航管理システムのAPIを活用した相互接続試験を福島ロボットテストフィールドで2020年2月まで実施し、同一空域で複数事業者のドローンが安全に飛行するための運航管理システムの実現に向け、APIの確立を目指すとしている。




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-
