[市場動向]
日立、自動車/物流向けのフィジカルAI技術を発表、制御ソフト開発効率化の自社事例を公開
2025年12月24日(水)日川 佳三、河原 潤(IT Leaders編集部)
日立製作所は2025年12月24日、自動車・物流分野の制御ソフトウェアを対象にフィジカルAIの実現に向けた技術を開発し、自社事例として研究成果を発表した。自動車分野では、コントローラ実機のAPI情報から、従来困難だった実機向けテストスクリプトを自動生成し、統合テスト工数を43%削減した。物流分野では、現場の環境や作業の変動要素を分析して制御ソフトの設計に反映することで、自律ロボット制御ソフトの再利用性と現場作業効率の向上を確認した。
日立製作所は、自動車・物流分野の制御ソフトウェアを対象に、フィジカルAI(Physical AI:物理AI)を実現するためのソフトウェア技術を開発し、自社事例として研究成果を発表した。
日立は、「社会インフラや産業現場では業務のデジタル化/自動化に伴いシステムが複雑化しており、現場ごとの仕様や運用条件への柔軟な対応が求められている」と指摘。現場のノウハウや実機固有の情報をソフトウェアに反映し、信頼性の高い自動化を実現することが課題ととらえている。
今回開発した技術は、制御工学/ソフトウェアとAI、ソフトウェア工学を融合させたフィジカルAIの実現に向けたもの。フィジカルAIを「AIの能力を現実世界の“もの”や“動き”と結びつけ、AIがセンサーやアクチュエータを通じて実世界で作業を行えるようにする技術」と説明する。
日立が取り組んだ1つ目の事例は、車載システム向けのテスト生成AI技術で、日立と自動車部品メーカーのAstemo(アステモ、2025年4月に日立Astemoから社名変更)が共同開発した。コントローラ実機固有のAPI情報や現場ノウハウをRAG(検索拡張生成)構成の生成AIシステムに取り込み、自然言語で記述したテストケース仕様から、現場知識を反映した実機向けのテストスクリプトを生成する(図1)。
従来、多大な工数を要していたテストスクリプトの作成を効率化する。検証では、マルチコアECUの統合テストに関するパイロットプロジェクトにおいて、43%の工数削減を図った。現場ごとに異なるハードウェア構成にも柔軟に対応できるという。
 図1:車載システム向けテスト生成AI技術の概要(出典:日立製作所)
図1:車載システム向けテスト生成AI技術の概要(出典:日立製作所)拡大画像表示
2つ目の事例は、物流分野に向けて、その変動性を管理することでロボット制御ソフトウェアの再利用性を向上させる技術である。工場や物流センターで発生する製品や環境、作業内容などの変動要素を事前に分析し、機能モデルとして整理することで、ソフトウェア上で柔軟に管理できるようにした。
具体的には、ロボット制御ソフトウェアをモジュール化してロボット用ミドルウェア「ROS(Robot Operating System)」上で動作するノードとして実装。これにより、新商品やピッキング/プレース条件の変更に対して迅速に対応できるようになり、ソフトウェアの再利用性を向上させる。検証結果と現場エンジニアやロボットオペレーターの声から、システム設定作業の効率が高まることを確認したという(図2)。
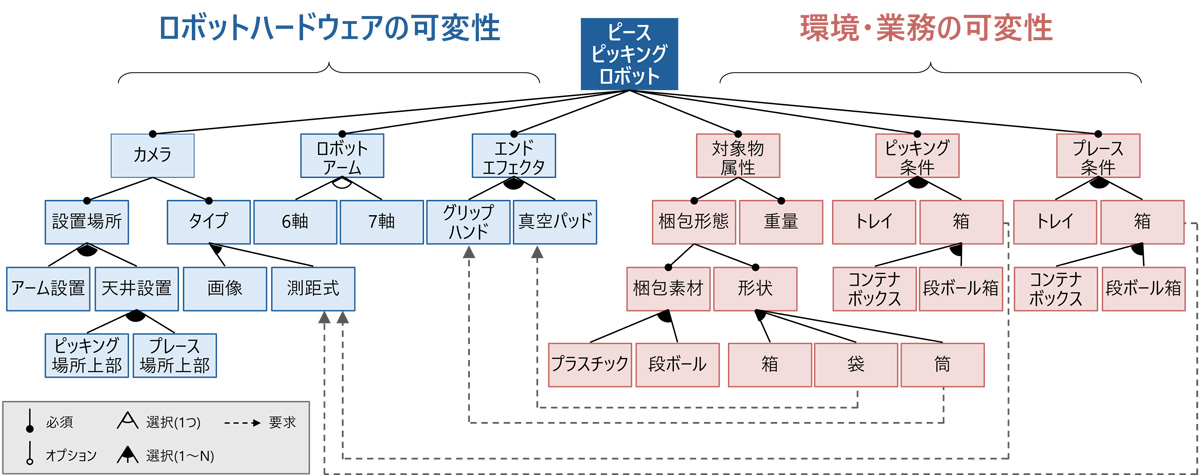 図2:物流分野の変動性を管理することによって、ロボット制御ソフトウェアの再利用性を向上させる技術の概要(出典:日立製作所)
図2:物流分野の変動性を管理することによって、ロボット制御ソフトウェアの再利用性を向上させる技術の概要(出典:日立製作所)拡大画像表示
2つの事例の研究成果は、ソフトウェア工学分野の国際会議「ASE 2025(40th IEEE/ACM International Conference on Automated Software Engineering)」に採択されている。日立は今後、制御ソフトウェア開発の効率化と現場作業者の負荷軽減を通じ、持続可能な社会インフラの実現に寄与するとしている。




- 業務システム 2027年4月強制適用へ待ったなし、施行迫る「新リース会計基準」対応の勘所【IT Leaders特別編集版】
- 生成AI/AIエージェント 成否のカギは「データ基盤」に─生成AI時代のデータマネジメント【IT Leaders特別編集号】
- フィジカルAI AI/ロボット─Society 5.0に向けた社会実装が広がる【DIGITAL X/IT Leaders特別編集号】
- メールセキュリティ 導入のみならず運用時の“ポリシー上げ”が肝心[DMARC導入&運用の極意]【IT Leaders特別編集号】
- ゼロトラスト戦略 ランサムウェア、AI詐欺…最新脅威に抗するデジタル免疫力を![前提のゼロトラスト、不断のサイバーハイジーン]【IT Leaders特別編集号】
-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

-

AIの真価は「今この瞬間」の感知にある。「Data Streaming Platform」で実現する「AI Ready Data」を解説
-

-

-

VDIの導入コストを抑制! コストコンシャスなエンタープライズクラスの仮想デスクトップ「Parallels RAS」とは
-

AI時代の“基幹インフラ”へ──NEC・NOT A HOTEL・DeNAが語るZoomを核にしたコミュニケーション変革とAI活用法
-

加速するZoomの進化、エージェント型AIでコミュニケーションの全領域を変革─「Zoom主催リアルイベント Zoomtopia On the Road Japan」レポート
-

14年ぶりに到来したチャンスをどう活かす?企業価値向上とセキュリティ強化・運用効率化をもたらす自社だけの“ドメイン”とは
-

-

-

-

生成AIからAgentic AIへ―HCLSoftware CRO Rajiv Shesh氏に聞く、企業価値創造の課題に応える「X-D-Oフレームワーク」
-

-

-

「プラグアンドゲイン・アプローチ」がプロセス変革のゲームチェンジャー。業務プロセスの持続的な改善を後押しする「SAP Signavio」
-

BPMとプロセスマイニングで継続的なプロセス改善を行う仕組みを構築、NTTデータ イントラマートがすすめる変革のアプローチ
-
